e‑NABLE Low‑Cost Prosthetic Hand
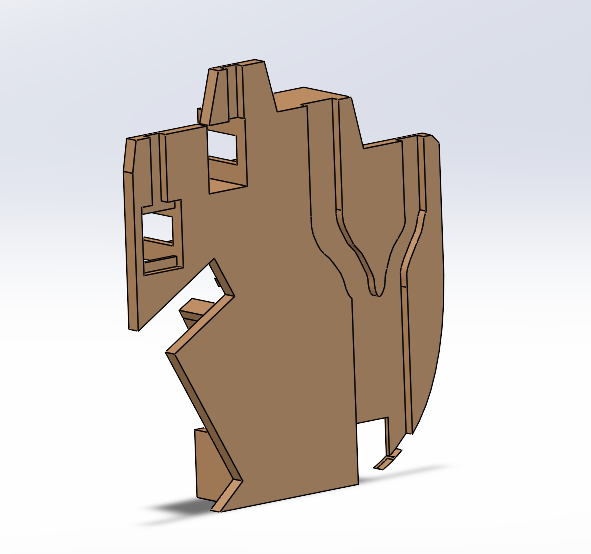
Internal Palm Architecture
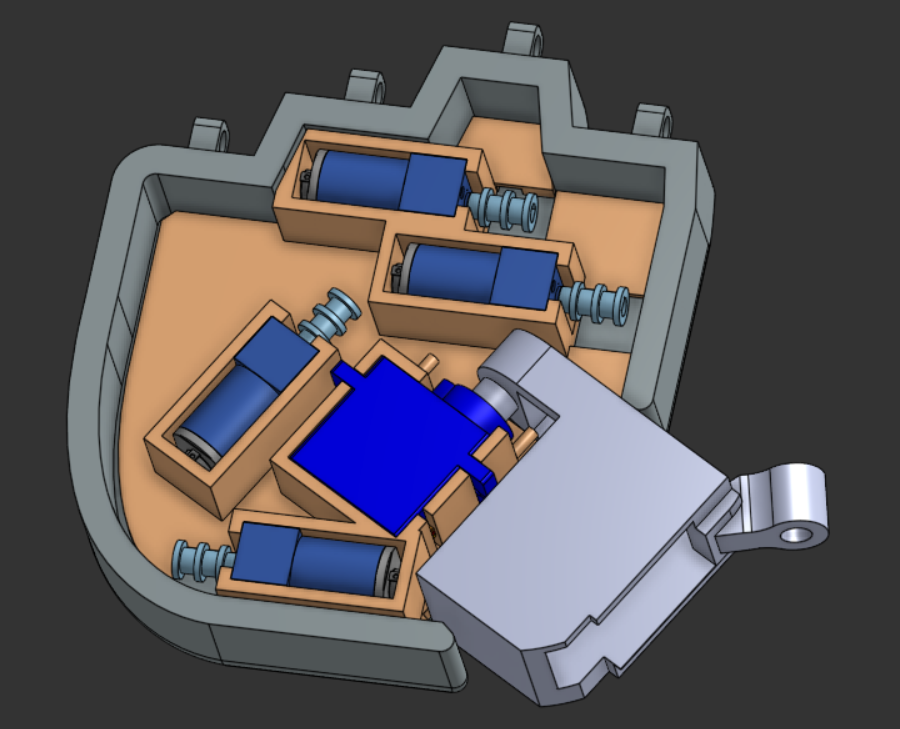
The palm serves as the central structural component of the hand, containing DC and servo mounts, guide channels, tendon routing features, and load‑bearing geometry. I developed a compact layout that reduced empty volume, improved tendon alignment, and increased overall grip rigidity.
- Motor Layout: DC and Servo Motor mounts were redesigned to reduce torsional looseness and resist cyclic loading.
- Further Component Integration: Motor drivers, Arduino, and power source will be integrated in remaining space.
- Tendon Routing: Integrated channels ensure constrained cable paths with repeatable tensioning.
Motor & Spool System
The spool assembly transforms rotational motor output into tendon‑driven flexion. I worked on refining the spool width, cable capture grooves, and guide geometry to reduce slipping and improve force transmission.
- Modified tension grooves to prevent tendon overwrap.
- Improved clamping system for repeatable cable installation.
- Balanced spool radius optimizing torque vs. travel.
Poster & Documentation
Outcome & Impact
This design enables a low‑cost, serviceable, customizable prosthetic hand with reliable motion and low material cost. These improvements contribute directly to accessibility, repairability, and realistic grasp quality for low‑resource prosthetic users.